Realizar reparos em módulos eletrônicos depende de profissionais especializados nesta área - Parte 3
A eletrônica embarcada nos veículos não é mais novidade, mas a manutenção adequada ainda precisa de boa formação de especialistas que possam garantir que a frota de veículos esteja em condições de uso
Por: André Miura - 17 de março de 2021
O reparo eletrônico feito baseado em tentativa e erro gera uma demanda alta de tempo para o reparo final do veículo e causa perda total de assertividade na causa original da falha. É importante dominar bem a arquitetura interna de uma ECU (Unidade de Controle Eletrônica) para recuperar esse tempo e precisão nos diagnósticos e reparos.
Nesta série, estamos abordando em cada artigo uma parte da arquitetura interna do hardware da ECU. No primeiro artigo, falamos sobre o circuito de alimentação. No segundo, sobre a entrada e processamento de sinais. Agora, vamos abordar como a ECU, após ser alimentada corretamente e já ter processado as informações dos sensores, pode comandar adequadamente os atuadores e alterar o regime de trabalho do sistema.
Esperamos que essa série de artigos desperte em você a curiosidade e a necessidade de se especializar no reparo eletrônico para trazer um diferencial na sua oficina. Usaremos durante as explicações uma ECU modelo para extrair os conceitos necessários.
Revisando a arquitetura de hardware de um módulo Diesel
Conforme consideramos nos primeiros artigos dessa série, veja a seguir os principais circuitos que você encontrará em um módulo de injeção Diesel:
• Circuito de Alimentação;
• Circuito de entrada e processamento de sinais;
• Circuito para comando de atuadores;
• Circuito de amplificação e armazenamento de tensões;
• Circuito de comunicação (Rede CAN e K).
Neste artigo focaremos no circuito de comando para atuadores e seus componentes principais. Também veremos um dos testes feitos neste circuito, durante uma rotina de trabalho de um reparador de módulos.
Como localizar os circuitos de comandos para atuadores
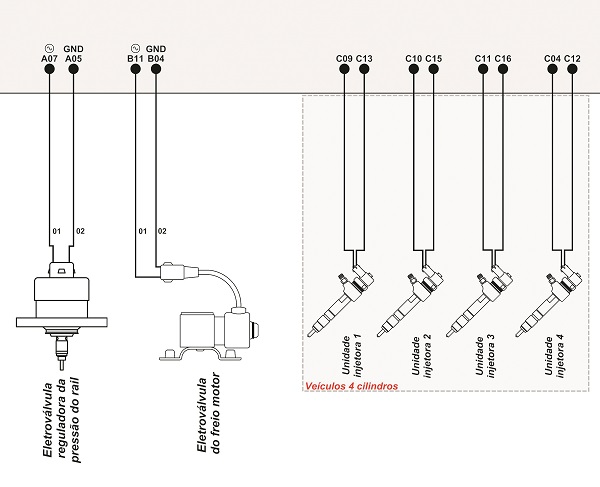
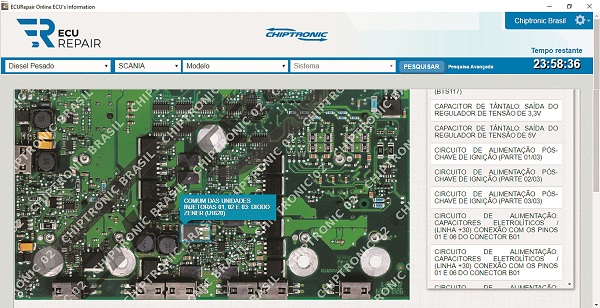
Para localizar esse importante conjunto de circuitos, vamos usar a técnica do mapeamento. Com um multímetro na escala de continuidade é possível localizar os componentes responsáveis por algum comando em falha, partindo do terminal indicado no esquema elétrico. Para tanto, é importante saber qual a sequência que será encontrada.
Precisamos ter em mente que sempre que fazemos o mapeamento de uma saída da ECU (no caso, um comando para atuador) iremos encontrar uma continuidade direta com o componente responsável, não sendo necessária a aplicação de muitos componentes filtro ou de proteção.
Princípio de comando para atuadores
Para reconhecermos a necessidade dos componentes que abordaremos nessa matéria, primeiro precisamos entender o princípio elétrico por trás dos comandos para atuadores.
Para pensar nisso, basta lembrar o que encontramos dentro dos vários atuadores que temos no sistema de injeção eletrônica. As unidades injetoras, os eletroinjetores, as eletroválvulas, os relés, dentre muitos outros, possuem no seu interior o mesmo elemento em comum – uma bobina (solenoide).
Portanto, para realizar algum trabalho nesse elemento, precisamos primeiro gerar um campo magnético nessa bobina. Para que isso aconteça, é necessário energizar essa bobina, fazendo com que uma corrente elétrica passe por ela. E vale lembrar que é possível existir tensão elétrica (Volt) e não ter corrente elétrica (Ampere), porém é impossível termos corrente elétrica sem ter tensão elétrica. No diagrama a seguir podemos entender melhor esse conceito.
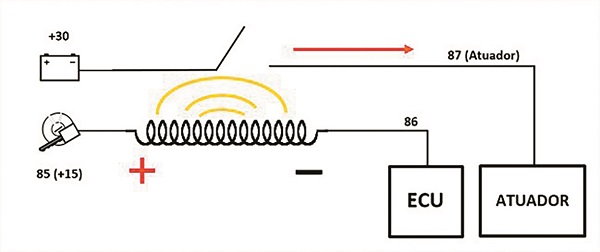
Nota-se que para comandar um relé representado na imagem 3, apenas ligar a ignição, ou seja, fornecer tensão elétrica, não foi o suficiente para acionar o atuador final. O motivo é que nesse caso, teríamos apenas o “positivo”. Para termos corrente elétrica foi necessário que a ECU fornecesse a potência faltante – “negativo”. Quando isso aconteceu tivemos corrente elétrica na bobina, que por sua vez gerou um campo magnético capaz de acionar a chave do relé. O princípio da “diferença de potencial” está por trás do comando para atuadores.
Exemplos de comandos para atuadores
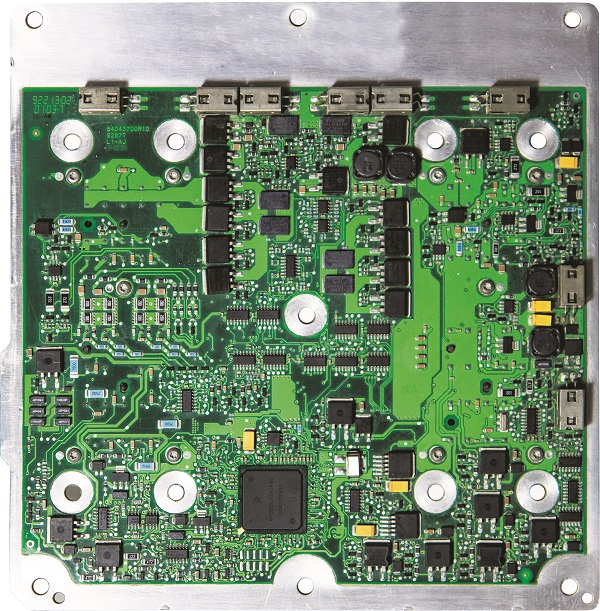
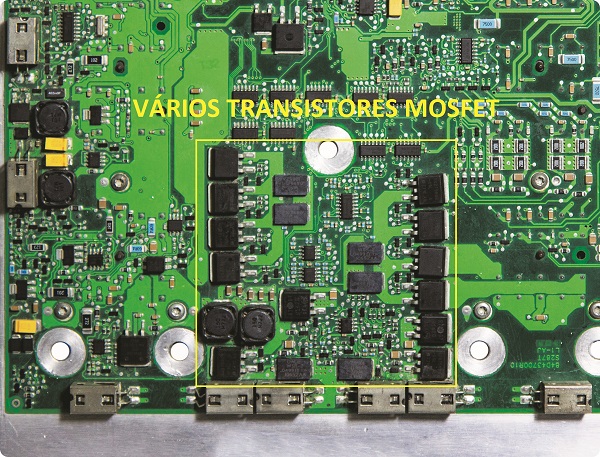
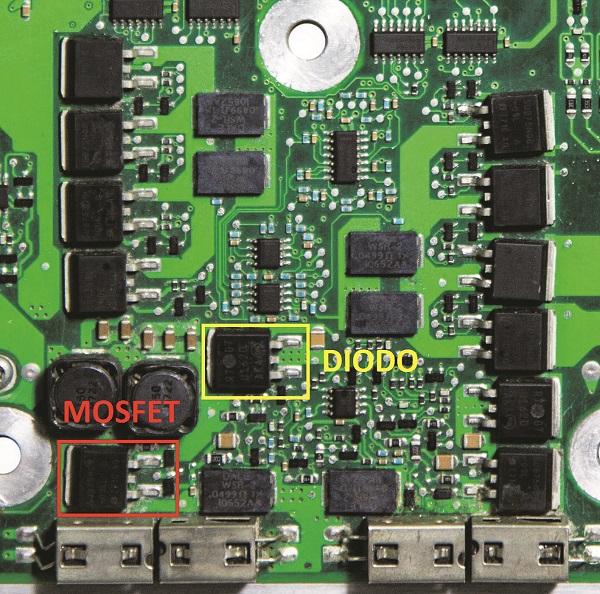
Como base para as explicações, usaremos um circuito de comando das unidades injetoras. Apenas com uma boa análise visual na placa, já é possível encontrar uma região dos circuitos responsáveis por tais comandos. Isso se dá pela presença em grande quantidade dos componentes principais sempre envolvidos com os comandos de atuadores diversos – o transistor MOSFET.
Transistor MOSFET
Logo após a ECU estar devidamente alimentada e recebendo os sinais dos sensores, com base na interpretação desses sinais, ela começa a executar tarefas previamente programadas em seu software para comandar atuadores. Esses comandos têm de vir do circuito que fez a interpretação dos sinais, chamado de “circuito lógico”. Esse circuito é composto pelo processador e memórias para consulta e armazenamento de instruções de trabalho.
Porém, embora seja o processador que interpreta os sinais dos sensores e inicia os comandos para atuadores, ele nunca comanda tais atuadores de maneira direta. Sempre entre o processador e a saída direta para um atuador teremos componentes chamados transistores.
Tais componentes, amplamente utilizados nas ECUs, podem ser comparados a pequenos “relés”, pois assim como um relé o transistor tem a função de realizar um chaveamento e assim, fornece uma tensão positiva ou um negativo que chega constantemente em sua fonte para o atuador final. O transistor amplamente utilizado para esse fim é MOSFET (Metal Oxide Semiconductor Field Effect Transistor).

Com base no princípio da diferença de potencial, concluímos, portanto, que o transistor é o responsável por fornecer a potência faltante para o atuador – negativo ou positivo. E no exemplo das unidades injetoras, ambas as potências são fornecidas pela ECU. No terminal 1 (Gate) temos um gatilho de acionamento do MOSFET; no terminal 2 (Dreno) uma conexão com o atuador externo que necessita de comando; e no terminal 3 (Source) a potência faltante para o atuador de maneira contínua.
Diodos de proteção
Um componente que pode nos confundir no momento do mapeamento é o diodo de proteção de retornos. Isso acontece pois muitas vezes ele possui uma cápsula de construção física igual ou similar a um MOSFET, por isso tenha atenção no momento do mapeamento. Com uma análise de continuidade com o multímetro podemos perceber, pelas potências conectadas a ele, que não se trata de um MOSFET de comando, e sim de um diodo de proteção. Ele pode estar em série ou em paralelo à linha de saída de acionamento do atuador.
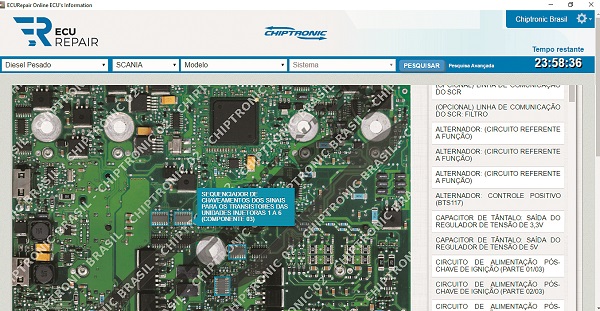
Gerenciamento dos comandos
Por fim, chegamos ao gerenciamento dos acionamentos. Nem sempre ele é feito diretamente pelo processador. Nos casos de acionamentos em que a ECU visa fornecer um negativo para o atuador, o comando pode ser feito diretamente pelo circuito lógico. Mas, nos casos de fornecimento de uma tensão positiva, mais componentes são necessários. Uma lei importante precisa ser seguida para acionar transistores MOSFET – a tensão de “gate” sempre deverá ser maior que tensão em “source”. Portanto, para acionamentos positivos, o circuito lógico que trabalha com 5V não consegue suprir, sendo necessária a aplicação de componentes de gerenciamento adicionais.
Como vimos em mais essa matéria, sem conhecimentos específicos é impossível efetuar reparos de módulos de injeção com sucesso. Especialize-se nessa área que talvez ainda não conheça - a eletrônica embarcada automotiva voltada ao reparo de módulos. Para isso, procure cursos específicos e mantenha-se sempre atualizado nas inovações da área automotiva. Procure ferramentas e softwares de consulta para auxiliá-lo.